Productos destacados

Shipcontroller EZVector
Shipcontroller DockerPro

Shipcontroller DockerOne
Sistema de posicionamiento dinámico

Shipcontroller ShipView R3
Shipcontroller NET

Shipcontroller a medida

Kits de mandos electrónicos
Tecnología Shipcontroller
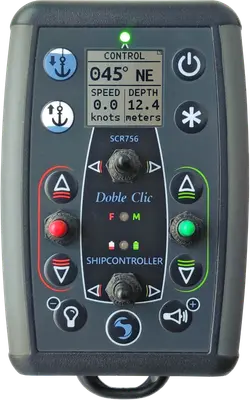
Los mandos a distancia Shipcontroller más avanzados incluyen una pantalla gráfica de tecnología híbrida, con un consumo de corriente ultra bajo y una alta velocidad de actualización. Sus características permiten mostrar la información de manera fluida, sin saltos molestos, y extender la duración de la batería.
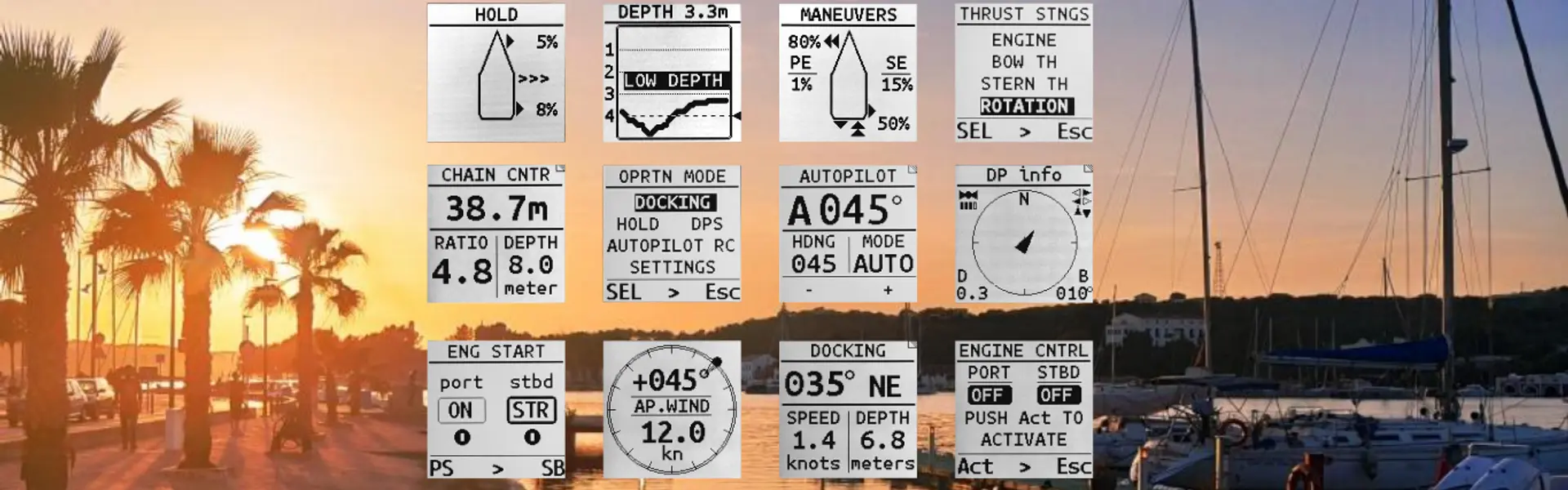
La pantalla permite visualizar información de navegación, alarmas, gráficos, y acceder al completo sistema de ajustes y configuración OnRemoteSetup.

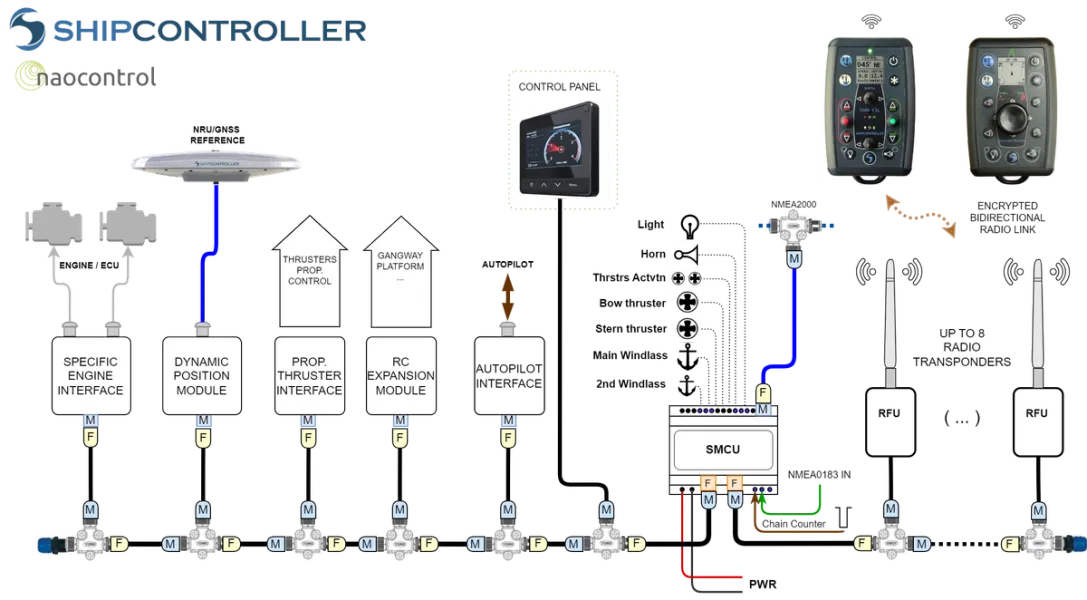
El sistema base Shipcontroller se puede conectar a las redes de datos del barco, como NMEA2000®, NMEA0183® o SeatalkNG®.
A través de esta conexión, se recopilan datos de navegación como rumbo, velocidad, profundidad y viento, que se transmiten al mando a distancia mediante el canal de datos por radio cifrado, permitiendo que estos se muestren en la pantalla o se utilicen para señalización, avisos o alarmas.
Esta función está disoponible en los mandos a distancia EZVector y DockerPro.
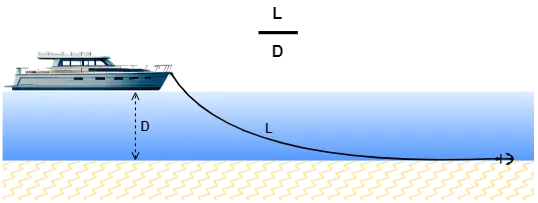
La función de contador de cadena visualiza la longitud de cadena largada, la profundidad del agua, y el ratio cadena/ancla, para ayudar a un fondeo más seguro.
La característica DobleClic reconoce una doble pulsación de un botón o interruptor, permitiendo asignar comandos diferentes a una sola pulsación y a una doble pulsación, haciendo posible ajustar dos niveles de empuje para una hélice o motor, utilizando los menús de ajustes del mando a distancia.
Aunque se asemeja al "clic" y "doble clic" de un ratón de computadora, es ligeramente diferente, ya que el botón o la palanca deben mantenerse accionados para que la acción surta efecto.
Por ejemplo, es posible configurar el mando a distancia para que una pulsación simple de un botón de la hélice de proa aplique un 60% de potencia, y que el "doble clic" aplique el 95%.
El modo AP de los mandos a distancia DockerPro y EZVector permite el control de un piloto automático compatible. Con el mando a distancia, puedes alternar entre los modos Standby y Auto, y realizar ajustes de rumbo en incrementos de ±1º o ±10º.

La función PulseThrust reduce el empuje promedio de un motor o propulsor aplicando una modulación por ancho de pulso de ciclo largo (PWM de ciclo largo). También permite duraciones de impulsos precisas. Esta técnica es útil en los siguientes escenarios:
- Los motores, cuando están al ralentí, tienen un empuje muy alto, lo que dificulta el control de la velocidad del barco durante maniobras a baja velocidad.
- Se desean impulsos de motor de duración precisa.
- Se necesita reducir el empuje promedio para los propulsores de tipo encendido/apagado; por ejemplo, para lograr un movimiento paralelo con SwayEase o para usar el modo Hold con propulsores de control de encendido/apagado.

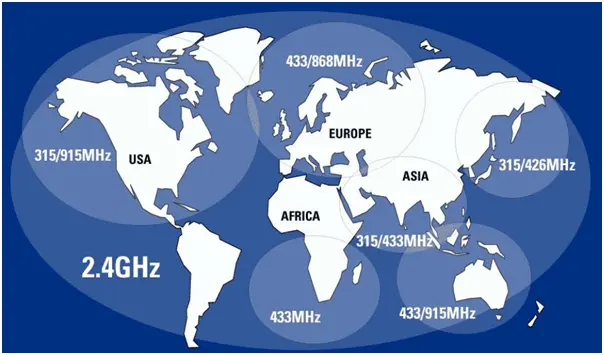
Shipcontroller utiliza un sistema de comunicación por radio bidireccional basado en el protocolo estándar IEEE 802.15.4 en la banda de 2.4GHz, ofreciendo numerosas ventajas:
- La radio bidireccional permite un diálogo continuo entre los mandos a distancia y los transceptores del barco. El enlace de radio se monitoriza permanentemente, y el mando te alertará de inmediato en caso de pérdida del enlace de radio, pérdida del control de motores u otros eventos o incidentes.
- El protocolo IEEE 802.15.4 en la banda de 2.4GHz es un protocolo aprobado para su uso en todo el mundo, a diferencia de los sistemas en las bandas de 833MHz y 915MHz, que tienen importantes restricciones regionales. Esto significa que puedes usar tu sistema Shipcontroller a nivel global sin limitaciones legales.
- Aunque utiliza la misma banda de radio que el WiFi, los canales de radio son diferentes (hay 16) para evitar posibles interferencias.
- Proporciona una comunicación robusta y confiable gracias a la técnica DSSS (Espectro Ensanchado por Secuencia Directa):
- Expande la señal en una banda de frecuencia más amplia de lo necesario, distribuyendo la energía a lo largo de un espectro mayor, lo que la hace más resistente a interferencias de banda estrecha.
- La señal se modula utilizando secuencias de códigos pseudoaleatorios. Solo el receptor que conoce esta secuencia puede demodular y recuperar la señal, reduciendo la posibilidad de interferencias o corrupción de la señal.
- Ofrece una velocidad de transmisión de datos adecuada para soportar un número prácticamente ilimitado de canales de control y la telemetría de datos de navegación.
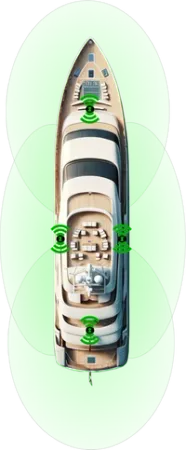
- Soporta configuraciones punto a punto y multipunto, permitiendo la implementación del sistema Shipcontroller NET con múltiples nodos de radio y varios mandos a distancia.
- Soporta cifrado AES de 128 bits para comunicaciones seguras.
Cada sistema Shipcontroller tiene un conjunto único de claves e identificadores, lo que hace que sea muy difícil interceptar el sistema de radio: hay 10³⁸ posibles claves
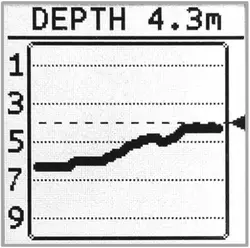
Las funciones de gráfico de profundidad y alarma de profundidad son muy útiles durante las maniobras del barco, ya que te permiten vigilar la profundidad para evitar varadas accidentales, especialmente cuando usas el mando a distancia fuera del puesto de gobierno y no puedes ver los instrumentos del barco.
El sistema Shipcontroller recoge los datos de profundidad de las redes de datos del barco y los envía al mando a distancia, que genera un gráfico de evolución de profundidad y lo muestra en la pantalla gráfica.
Además, el usuario puede ajustar el nivel de alarma de profundidad, de modo que el mando avisará mediante un mensaje y una vibración si la profundidad es demasiado baja.


WindlassGuardian protege el molinete de ancla y la proa del barco de los golpes y tensiones que pueden ocurrir al subir el ancla o si se alcanza el final de la línea de fondeo durante su despliegue.
WindlassGuardian permite establecer límites del contador de cadena tanto para bajar como para subir el ancla, de modo que:
- Si estás subiendo el ancla y se alcanza el límite (por ejemplo, 1.5 m): El molinete se detendrá, y el mando a distancia mostrará un mensaje en la pantalla y te notificará con una vibración. Para continuar subiendo el ancla, debes soltar el botón del molinete y presionarlo nuevamente.
- Si estás bajando el ancla y se alcanza el límite de descenso: El molinete se detendrá. El mando a distancia mostrará un mensaje de advertencia y te notificará con una vibración. No podrás seguir bajando el ancla desde el mando a distancia.

Compatibilidad
El requisito esencial para un mando a distancia de embarcaciones a motor es la capacidad de controlar los sistemas de propulsión del barco (motores y propulsores), así como algunas funciones secundarias, como el control del molinete o la sirena. Además, para sus funciones más avanzadas, Shipcontroller necesita conectarse a otros sistemas del barco, como las redes de datos de navegación.
Para ello, Shipcontroller incluye en su lista de compatibilidad:
- La mayoría de los principales sistemas de control electrónico de motores.
- La mayoría de los principales sistemas de hélices de proa y popa, incluyendo los últimos modelos de hélices de control continuo.
- La mayoría de los molinetes de ancla y tecnologías de contador de cadena.
- Los principales buses de comunicaciones marinas: NMEA2000®, SeatalkNG®, NMEA0183® (Shipcontroller es miembro de NMEA.ORG).
Shipcontroller trabaja constantemente para ampliar la lista de compatibilidad e incluir los nuevos avances (como motorizaciones eléctricas e híbridas o thrusters proporcionales), así como para desarrollar nuevos interfaces para sistemas de control obsoletos y extender su vida útil.
Arquitectura Shipcontroller