Descripción general de EZVector
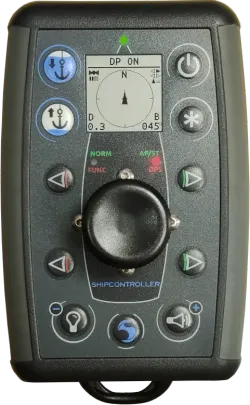
Shipcontroller EZVector es un mando a distancia que permite controlar el barco de forma muy sencilla e intuitiva, gracias al joystick integrado de tres ejes.
La inteligencia detrás de los algoritmos de control de EZVector es capaz de calcular maniobras combinadas complejas, que se ejecutan simplemente empujando el joystick en la dirección adecuada. Por ejemplo:
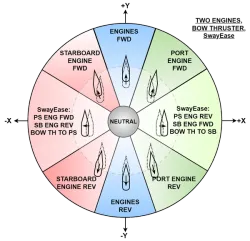
- La función SwayEase ayuda a desplazar lateralmente el barco, en una configuración de dos motores y hélice de proa.
- La función PivotPoint permite ajustar con precisión la rotación del barco en configuraciones de dos motores y hélices de proa y popa.
EZVector admite muchas otras configuraciones de propulsión, como la de un solo motor y hélices de proa y popa, o un modo específico para propulsión IPS.
Diseñado como un sistema de control multifunción, EZVector incluye características que lo hacen único en el mercado; entre ellas:
- Pantalla integrada con telemetría de datos de navegación y sistema de menús OnRemoteSetup.
- Modo Hold con thrusters.
- Modo DPS para control del sistema de posicionamiento dinámico Shipcontroller.
- Contador de cadena y calculadora de fondeo.
- Pantalla de sonda gráfica y alarma de profundidad.
Capacidades de control de EZVector

El control remoto EZVector, integrado con el sistema Shipcontroller, permite realizar maniobras simples y compuestas, incorporando funciones avanzadas y cálculos complejos, mientras interactúa de manera continua con los sistemas del barco, aportando una nueva dimensión al concepto de "canal de control".
Sus capacidades avanzadas de control están diseñadas para gestionar una amplia gama de sistemas y configuraciones a bordo del barco. Estas incluyen:
Control de Propulsión:
- Control de uno, dos o más motores, con control proporcional por escalones o continuo, o control de velocidad dual/simple. Compatible con la mayoría de los controles electrónicos de motores en el mercado.
- Capacidad para seleccionar la estación de control de motores y monitorizar el estado de control (dependiendo del modelo del sistema de control de motores).
- Control de hélices de proa y popa, con control proporcional continuo o todo/nada. Compatible con la mayoría de los sistemas de hélices del mercado, tanto eléctricos como hidráulicos, proporcionales o on/off.
- Función PulseThrust aplicable a motores y hélices, para lograr un empuje promedio reducido o impulsos de empuje precisos.
- Función DobleClic para dos niveles de potencia mediante los botones de control de hélices.
Maniobras Avanzadas:
- Algoritmos de control EZVector para diferentes configuraciones de propulsión, incluyendo un motor, dos motores y el modo IPS.
- Maniobras combinadas con el joystick, que incluyen SwayEase para el movimiento lateral del barco con dos motores y una hélice de proa, PivotPoint para un control preciso de la rotación del barco y ThrustersBalance para ajustar el movimiento lateral utilizando hélices de proa y popa.
- Control del sistema DPS de Shipcontroller, que mantiene la posición y el rumbo del barco dentro de márgenes de error reducidos.
Otras Funciones de Control:
- Control de uno o dos molinetes de ancla, con contador de cadena y calculadora de fondeo, y WindlassGuardian para proteger el molinete y el ancla durante el izado y el descenso. (Para el molinete principal).
- Control de un piloto automático compatible, que permite activación/desactivación y cambios de rumbo.
- Modo RC para controlar un módulo opcional para una pasarela o plataforma compatible.
- Control de la sirena y las luces de cubierta.
Concepto de control remoto multifunción

Los controles remotos EZVector y DockerPro incorporan el concepto de control remoto multifunción, diseñado para ofrecer un control integral sobre diversos aspectos de la operación del barco, mejorando tanto la maniobrabilidad como la seguridad:
- Modo Docking: El modo predeterminado para maniobras de atraque y fondeo. Permite un control preciso de la propulsión del barco utilizando el joystick y los botones de control de los propulsores, habilitando maniobras combinadas como rotación con PivotPoint, o movimientos laterales con SwayEase. También ofrece control sobre el molinete del ancla con la función WindlassGuardian, que protege el molinete, la cuerda y el ancla de daños. Las diferentes pantallas pueden mostrar el estado de la maniobra, datos de navegación, conteo de cadena y una calculadora de fondeo, así como un gráfico de profundidad.
- Modo Hold: Activa ambos propulsores a baja velocidad con solo presionar un botón, para mantener el barco pegado al muelle. El empuje de los propulsores de proa y popa se puede ajustar de forma independiente utilizando los botones de control de los propulsores.
- Modeo DPS: Habilita, deshabilita y monitoriza el estado del módulo opcional del sistema de posicionamiento dinámico (DPS), lo que permite un mantenimiento preciso de la posición y rumbo del barco. En este modo, el control de la propulsión permanece completamente disponible.
- Modo AP (Autopilot): Permite que el mando opere un sistema de piloto automático compatible, permitiendo activar los modos Auto y Standby, y ajustar el rumbo en saltos de ±1° y ±10°. Mientras este modo está activo, las funciones de control de la propulsión están completamente deshabilitadas.
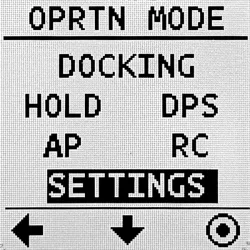
- Modo RC (Remote Control): Proporciona acceso a pantallas específicas para controlar módulos de expansión especializados, como un controlador de pasarela/plataforma o un módulo de arranque/parada de motor.
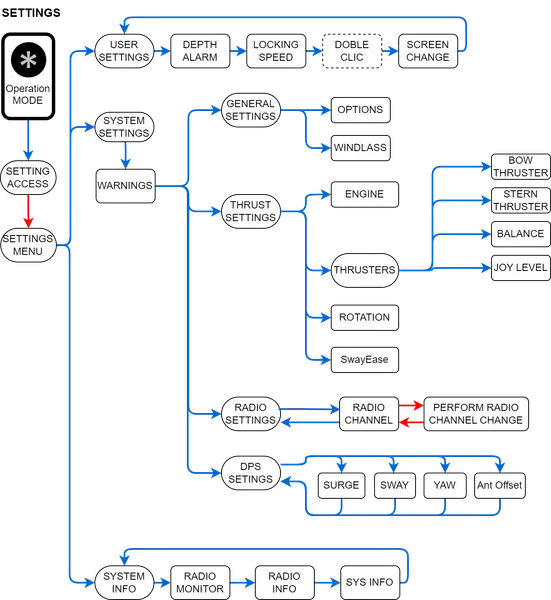
- Modo AJUSTES (Settings): Ofrece acceso a varios menús de configuración para personalizar el sistema según las preferencias del usuario. La función OnRemoteSetup permite al instalador o al usuario realizar la mayoría de los ajustes del sistema directamente desde el control remoto.
Resumen de características técnicas
- Sistema de radio bidireccional con cifrado, sobre protocolo IEEE 802.15.4, robusto y resistente a interferencias. Estándar aprobado para uso en todo el mundo.
- Robusto Joystick de 3 ejes de efecto Hall, de larga vida útil, y resistencia al agua IP67, para control de motores, thrusters, y para maniobras combinadas.
- Pantalla de tecnología híbrida, de ultra bajo consumo y gran contraste, visible a plena luz del sol y también en condiciones de iluminación baja.
- Pulsadores mecánicos de alta calidad y larga vida útil. (No usa teclado de membrana).
- Pulsadores independientes para control de hélices de proa y popa, con la función DobleClic.
- Batería de LiPo recargable. Carga inalámbrica sin contacto, estándar QI.
- Motor de vibración para avisos y señalización de alarmas.
- Mando a distancia resistente al agua IP65.
Características de Fondeo, Navegación y Seguridad
La función de contador de cadena visualiza la longitud de cadena largada, la profundidad del agua, y el ratio cadena/ancla, para ayudar a un fondeo más seguro.
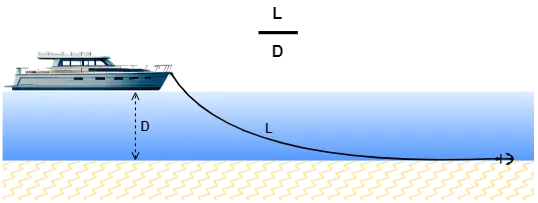
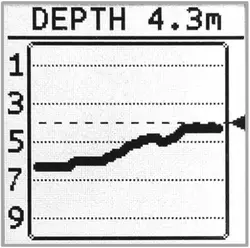
Las funciones de gráfico de profundidad y alarma de profundidad son muy útiles durante las maniobras del barco, ya que te permiten vigilar la profundidad para evitar varadas accidentales, especialmente cuando usas el mando a distancia fuera del puesto de gobierno y no puedes ver los instrumentos del barco.
El sistema Shipcontroller recoge los datos de profundidad de las redes de datos del barco y los envía al mando a distancia, que genera un gráfico de evolución de profundidad y lo muestra en la pantalla gráfica.
Además, el usuario puede ajustar el nivel de alarma de profundidad, de modo que el mando avisará mediante un mensaje y una vibración si la profundidad es demasiado baja.

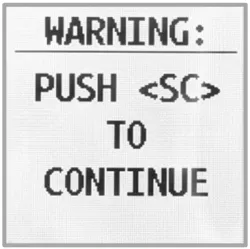
Esta función de seguridad garantiza que las funciones de control no estén disponibles inmediatamente después de presionar el botón de encendido del control remoto.
El usuario debe confirmar la activación del control remoto presionando un botón diferente.
El inicio en dos fases se puede desactivar a través de la configuración del control remoto si se desea.
Esta función está disponible para los controles remotos DockerPro y EZVector.
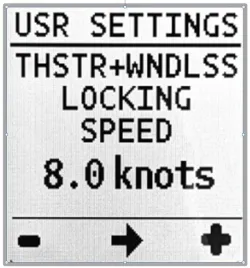
Esta función mejora la seguridad al bloquear automáticamente el molinete y las hélices a una cierta velocidad, evitando el uso accidental y reduciendo el riesgo de daños.
Al desactivar el molinete y las hélices cuando el barco se mueve demasiado rápido, se previenen situaciones peligrosas, como el despliegue del ancla a velocidades excesivas, lo que podría causar daños graves o pérdida de control.
Además, asegura que las hélices no se activen cuando el barco se encuentra a una velocidad en la que su uso sería ineficaz o perjudicial.
Los usuarios pueden desactivar o ajustar la velocidad de bloqueo a través de la configuración del mando a distancia, proporcionando flexibilidad para adaptarse a diferentes necesidades operativas.

WindlassGuardian protege el molinete de ancla y la proa del barco de los golpes y tensiones que pueden ocurrir al subir el ancla o si se alcanza el final de la línea de fondeo durante su despliegue.
WindlassGuardian permite establecer límites del contador de cadena tanto para bajar como para subir el ancla, de modo que:
- Si estás subiendo el ancla y se alcanza el límite (por ejemplo, 1.5 m): El molinete se detendrá, y el mando a distancia mostrará un mensaje en la pantalla y te notificará con una vibración. Para continuar subiendo el ancla, debes soltar el botón del molinete y presionarlo nuevamente.
- Si estás bajando el ancla y se alcanza el límite de descenso: El molinete se detendrá. El mando a distancia mostrará un mensaje de advertencia y te notificará con una vibración. No podrás seguir bajando el ancla desde el mando a distancia.


El sistema base Shipcontroller se puede conectar a las redes de datos del barco, como NMEA2000®, NMEA0183® o SeatalkNG®.
A través de esta conexión, se recopilan datos de navegación como rumbo, velocidad, profundidad y viento, que se transmiten al mando a distancia mediante el canal de datos por radio cifrado, permitiendo que estos se muestren en la pantalla o se utilicen para señalización, avisos o alarmas.
Esta función está disoponible en los mandos a distancia EZVector y DockerPro.
Caracteristicas de control y comunicaciones

Shipcontroller NET es una extensión del sistema Shipcontroller que permite desplegar múltiples transceptores de radio en la cubierta del barco, formando una malla de nodos de comunicación que ofrece ventajas como:
- Aumentar la robustez y el alcance del sistema de radio, especialmente en embarcaciones de gan eslora o cuando la cubierta es metálica y puede bloquear las señales de radio.
- Proporcionar redundancia y alta disponibilidad del sistema de radio para aplicaciones críticas.
Los transceptores de radio están interconectados a través del Shipcontroller CANbus, que puede alcanzar una longitud de 250 metros, o incluso más utilizando extensiones de bus.
Los transceptores de radio se alimentan directamente desde el bus, lo que hace que la instalación sea muy sencilla.
El sistema NET admite el uso de múltiples mandos a distancia (incluso de diferentes modelos) con control de concurrencia, asegurando que solo uno pueda tener el control en un momento dado.

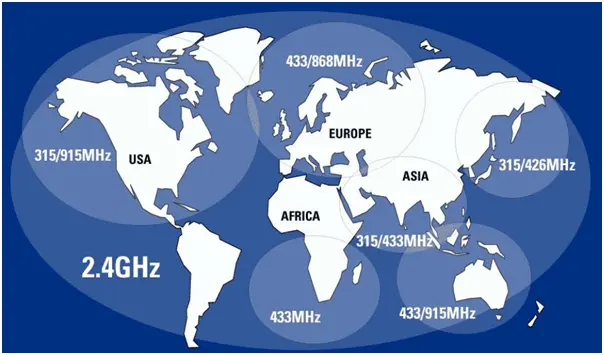
Shipcontroller utiliza un sistema de comunicación por radio bidireccional basado en el protocolo estándar IEEE 802.15.4 en la banda de 2.4GHz, ofreciendo numerosas ventajas:
- La radio bidireccional permite un diálogo continuo entre los mandos a distancia y los transceptores del barco. El enlace de radio se monitoriza permanentemente, y el mando te alertará de inmediato en caso de pérdida del enlace de radio, pérdida del control de motores u otros eventos o incidentes.
- El protocolo IEEE 802.15.4 en la banda de 2.4GHz es un protocolo aprobado para su uso en todo el mundo, a diferencia de los sistemas en las bandas de 833MHz y 915MHz, que tienen importantes restricciones regionales. Esto significa que puedes usar tu sistema Shipcontroller a nivel global sin limitaciones legales.
- Aunque utiliza la misma banda de radio que el WiFi, los canales de radio son diferentes (hay 16) para evitar posibles interferencias.
- Proporciona una comunicación robusta y confiable gracias a la técnica DSSS (Espectro Ensanchado por Secuencia Directa):
- Expande la señal en una banda de frecuencia más amplia de lo necesario, distribuyendo la energía a lo largo de un espectro mayor, lo que la hace más resistente a interferencias de banda estrecha.
- La señal se modula utilizando secuencias de códigos pseudoaleatorios. Solo el receptor que conoce esta secuencia puede demodular y recuperar la señal, reduciendo la posibilidad de interferencias o corrupción de la señal.
- Ofrece una velocidad de transmisión de datos adecuada para soportar un número prácticamente ilimitado de canales de control y la telemetría de datos de navegación.
- Soporta configuraciones punto a punto y multipunto, permitiendo la implementación del sistema Shipcontroller NET con múltiples nodos de radio y varios mandos a distancia.
- Soporta cifrado AES de 128 bits para comunicaciones seguras.
Cada sistema Shipcontroller tiene un conjunto único de claves e identificadores, lo que hace que sea muy difícil interceptar el sistema de radio: hay 10³⁸ posibles claves

El protocolo de radio de Shipcontroller permite que múltiples mandos a distancia se utilicen en el mismo barco, compartiendo claves de seguridad únicas, mientras se asegura que solo un mando pueda tener el control en un momento dado.
Contar con un segundo mando mejora la seguridad y confiabilidad del sistema Shipcontroller, proporcionando un respaldo en caso de pérdida, rotura o fallo del mando principal.
El modo AP de los mandos a distancia DockerPro y EZVector permite el control de un piloto automático compatible. Con el mando a distancia, puedes alternar entre los modos Standby y Auto, y realizar ajustes de rumbo en incrementos de ±1º o ±10º.

Todos los mandos a distancia Shipcontroller incluyen botones para la activación de la sirena y de las luces de cubierta.
El pulsador de activación de la sirena es de tipo monostable, es decir, accionará la sirena mientras el botón se mantenga pulsado.
Por otro lado, la función de control de las luces de cubierta es de tipo biestable: la salida de control conmuta cada vez que pulsamos el botón. Esta salida conmutada puede utilizarse para encender y apagar las luces de cubierta, o para otros usos.
El modo RC (Control Remoto) permite controlar un módulo de expansión opcional para, por ejemplo, manejar desde el mando a distancia Shipcontroller los movimientos de una pasarela o una plataforma motorizada de popa. Estos módulos de expansión son Plug & Play; una vez conectados a la red Shipcontroller, serán detectados automáticamente por el mando a distancia, que habilitará los menús correspondientes.
Existen módulos de expansión:
- Para el control de hasta 4 ejes de una pasarela o plataforma compatible.
- Con 8 salidas de relé de propósito general.
- Para arranque/parada de motores (en desarrollo).
Caracteristicas de Hardware
Los mandos a distancia Shipcontroller más avanzados incluyen una pantalla gráfica de tecnología híbrida, con un consumo de corriente ultra bajo y una alta velocidad de actualización. Sus características permiten mostrar la información de manera fluida, sin saltos molestos, y extender la duración de la batería.
La pantalla permite visualizar información de navegación, alarmas, gráficos, y acceder al completo sistema de ajustes y configuración OnRemoteSetup.

IP65 es una clasificación definida por la Comisión Electrotécnica Internacional (IEC) bajo la norma IEC 60529. Se utiliza para clasificar el grado de protección que proporcionan las cubiertas de los equipos eléctricos contra el polvo y el agua. "IP" significa "Protección de Ingreso."
- 6: El primer dígito indica la protección contra objetos sólidos, como el polvo. Una clasificación de 6 significa que la cubierta es completamente hermética al polvo, ofreciendo protección total contra la entrada de polvo.
- 5: El segundo dígito indica la protección contra líquidos. Una clasificación de 5 significa que la cubierta está protegida contra chorros de agua de baja presión desde cualquier dirección. Sin embargo, no es completamente a prueba de agua, y la inmersión prolongada no estaría cubierta.
En resumen, IP65 significa que el dispositivo está completamente protegido contra el polvo y puede resistir chorros de agua de baja presión, pero no está diseñado para ser sumergido en agua.

Algunos modelos de mandos a distancia Shipcontroller incorporan un joystick que permite controlar la propulsión del barco de manera muy sencilla e intuitiva.
Se trata de un robusto joystick de tres ejes, de efecto Hall, con resistencia al agua y al polvo en grado IP67, especialmente adecuado para aplicaciones marinas.
El joystick permite control proporcional continuo en los ejes X e Y, y también reconoce la rotación en el eje Z.
La tecnología Hall significa que tiene un mínimo de piezas móviles y la detección de posición se realiza sin contacto, lo que le otorga una vida útil muy larga. (No sufre el desgaste de los modelos con potenciómetros internos).

Todos los modelos de control remoto de Shipcontroller cuentan con una batería interna de LiPo y un receptor de carga inalámbrica que opera bajo el estándar QI, ampliamente utilizado por muchos teléfonos inteligentes.
Esto significa que puedes usar el cargador de Shipcontroller para cargar tu teléfono compatible con QI, o utilizar un cargador QI para smartphones para cargar tu control remoto de Shipcontroller.
Esta compatibilidad permite experiencias de carga sin interrupciones, asegurando que tu control remoto esté siempre listo para usar sin necesidad de cables de carga específicos.
Ya sea en el barco o en casa, los usuarios pueden cargar fácilmente sus dispositivos utilizando cargadores inalámbricos comunes QI, mejorando tanto la comodidad como la eficiencia.
Maniobras inteligentes
La característica DobleClic reconoce una doble pulsación de un botón o interruptor, permitiendo asignar comandos diferentes a una sola pulsación y a una doble pulsación, haciendo posible ajustar dos niveles de empuje para una hélice o motor, utilizando los menús de ajustes del mando a distancia.
Aunque se asemeja al "clic" y "doble clic" de un ratón de computadora, es ligeramente diferente, ya que el botón o la palanca deben mantenerse accionados para que la acción surta efecto.
Por ejemplo, es posible configurar el mando a distancia para que una pulsación simple de un botón de la hélice de proa aplique un 60% de potencia, y que el "doble clic" aplique el 95%.
La tecnología EZVector facilita maniobras simples o combinadas de motores y hélices, haciendo que el manejo del barco sea fácil e intuitivo al utilizar el joystick del mando a distancia.
EZVector es el algoritmo que determina cómo se operan los motores y las hélices de proa y popa cuando movemos la palanca del joystick en el plano horizontal (plano XY).
EZVector admite diferentes combinaciones de modos de control de motores y hélices, como el control proporcional, el control on/off, o el control PulseThrust, permitiendo un manejo preciso y fácil del barco, y facilitando la ejecución de maniobras complejas de manera intuitiva.
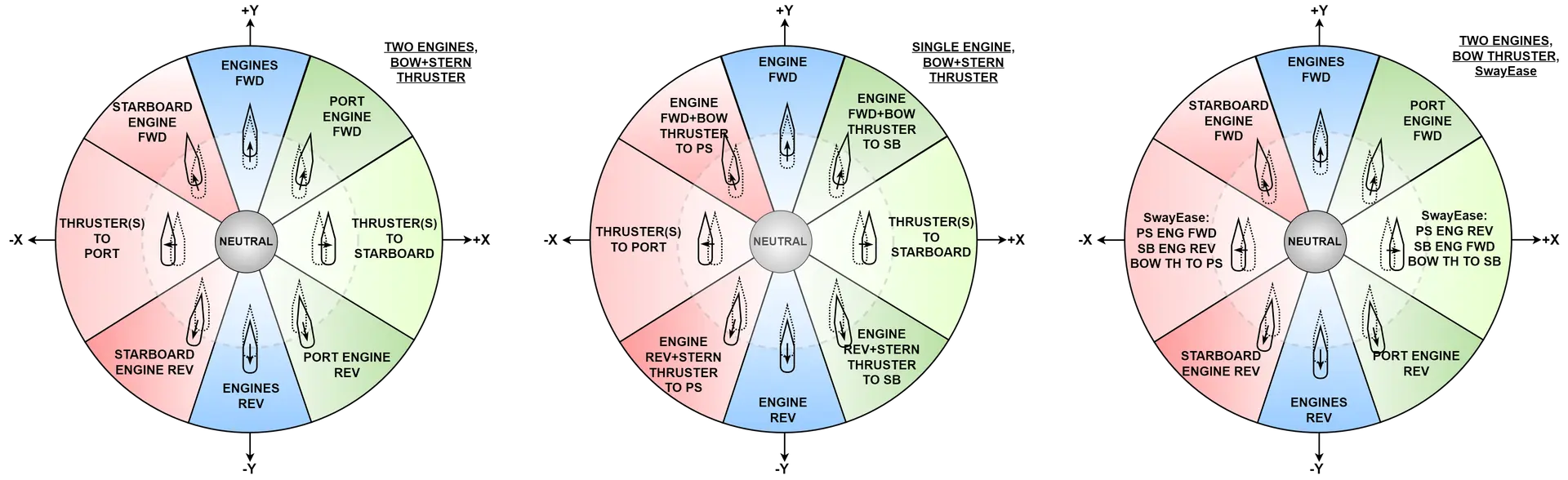
EZVector admite las siguientes configuraciones:
- Un solo motor y hélices de proa y popa
- Dos motores y una hélice de proa
- Dos motores y hélices de proa y popa
- Propulsión Volvo® IPS
- Configuraciones personalizadas
La función HOLD con las hélices de proa y popa te permite activar ambas hélices simultáneamente con un simple clic en un botón o palanca, aplicando un empuje preestablecido para mantener el barco junto al muelle.
La intensidad del empuje puede incrementarse de forma dinámica mediante pulsaciones sucesivas en los controles de los thrusters.
Esta función requiere hélices de proa y popa con control proporcional.
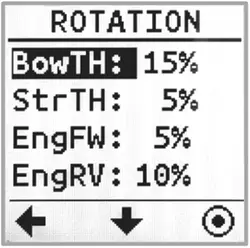
PivotControl permite un control preciso de la rotación del barco al utilizar el eje Z del joystick del control remoto, usando una combinación flexible de empujes de motores y propulsores para lograr un control preciso del punto de pivote del barco.
Los niveles de empuje del propulsor de proa, el propulsor de popa, el motor hacia adelante y el motor en reversa se pueden ajustar según sea necesario. La función PivotControl se activa simplemente girando el joystick en el control remoto.
Esta función está disponible en el control remoto EZVector.

La función PulseThrust reduce el empuje promedio de un motor o propulsor aplicando una modulación por ancho de pulso de ciclo largo (PWM de ciclo largo). También permite duraciones de impulsos precisas. Esta técnica es útil en los siguientes escenarios:
- Los motores, cuando están al ralentí, tienen un empuje muy alto, lo que dificulta el control de la velocidad del barco durante maniobras a baja velocidad.
- Se desean impulsos de motor de duración precisa.
- Se necesita reducir el empuje promedio para los propulsores de tipo encendido/apagado; por ejemplo, para lograr un movimiento paralelo con SwayEase o para usar el modo Hold con propulsores de control de encendido/apagado.
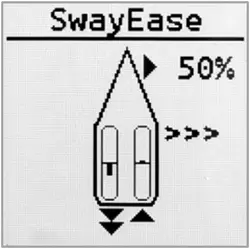
SwayEase es una maniobra combinada que utiliza dos motores contrarrotantes y el propulsor de proa para facilitar el movimiento lateral del barco.
La maniobra SwayEase se puede habilitar o deshabilitar en la configuración del control remoto. Cuando está habilitada, se activa al mover el joystick hacia los lados.
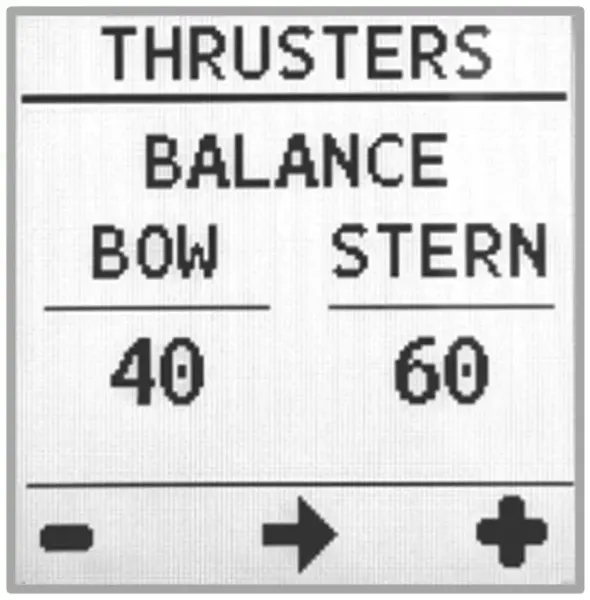
Thrusters Balance es una función que permite la distribución del empuje entre los propulsores de proa y popa para asegurar que el barco se mueva de manera paralela durante los movimientos laterales al usar el joystick.
Cuando se utiliza el joystick del control remoto EZVector con propulsores proporcionales de proa y popa, es probable que la proa se mueva más que la popa, causando una rotación notable del barco.
El ajuste de balance compensa los empujes para mitigar este efecto.
Caractyerísticas de facilidad de uso

Todos los mandos a distancia Shipcontroller incorporan la función de Auto-Apagado.
Si se apaga el sistema base de Shipcontroller, el mando detectará la pérdida del enlace de radio, y le avisará mediante señales visuales (led rojo) y por vibración. Si no lo usa, se apagará en 30 segundos.
La función de Monitorización de Maniobras proporciona una visualización gráfica de cómo se están ejecutando las maniobras de propulsión ordenadas desde el control remoto.
Esto ayuda a aprender a manejar el control remoto y promueve una operación segura.

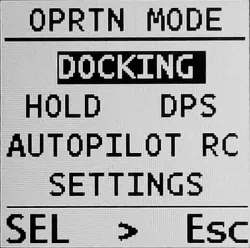
Los controles remotos EZVector y DockerPro incorporan el concepto de control remoto multifunción, diseñado para ofrecer un control integral sobre diversos aspectos de la operación del barco, mejorando tanto la maniobrabilidad como la seguridad:
- Modo Docking: El modo predeterminado para maniobras de atraque y fondeo. Permite un control preciso de la propulsión del barco utilizando el joystick y los botones de control de los propulsores, habilitando maniobras combinadas como rotación con PivotPoint, o movimientos laterales con SwayEase. También ofrece control sobre el molinete del ancla con la función WindlassGuardian, que protege el molinete, la cuerda y el ancla de daños. Las diferentes pantallas pueden mostrar el estado de la maniobra, datos de navegación, conteo de cadena y una calculadora de fondeo, así como un gráfico de profundidad.
- Modo Hold: Activa ambos propulsores a baja velocidad con solo presionar un botón, para mantener el barco pegado al muelle. El empuje de los propulsores de proa y popa se puede ajustar de forma independiente utilizando los botones de control de los propulsores.
- Modeo DPS: Habilita, deshabilita y monitoriza el estado del módulo opcional del sistema de posicionamiento dinámico (DPS), lo que permite un mantenimiento preciso de la posición y rumbo del barco. En este modo, el control de la propulsión permanece completamente disponible.
- Modo AP (Autopilot): Permite que el mando opere un sistema de piloto automático compatible, permitiendo activar los modos Auto y Standby, y ajustar el rumbo en saltos de ±1° y ±10°. Mientras este modo está activo, las funciones de control de la propulsión están completamente deshabilitadas.
- Modo RC (Remote Control): Proporciona acceso a pantallas específicas para controlar módulos de expansión especializados, como un controlador de pasarela/plataforma o un módulo de arranque/parada de motor.
Modo AJUSTES (Settings): Ofrece acceso a varios menús de configuración para personalizar el sistema según las preferencias del usuario. La función OnRemoteSetup permite al instalador o al usuario realizar la mayoría de los ajustes del sistema directamente desde el control remoto
OnRemoteSetup permite a los usuarios configurar la mayoría de los ajustes del sistema directamente desde el control remoto utilizando sus botones, pantalla y menús.
Esta función mejora la comodidad y la eficiencia al permitir ajustes sobre la marcha sin necesidad de acceder a una unidad de control central.
La interfaz intuitiva garantiza facilidad de uso, mientras que la capacidad de realizar cambios en tiempo real mejora tanto la seguridad como el rendimiento operativo.
Los ajustes personalizables permiten a los usuarios adaptar el sistema a sus necesidades específicas, asegurando un control y una gestión óptimos.
Esta función está disponible para los controles remotos DockerPro y EZVector.