DockerPro Overview
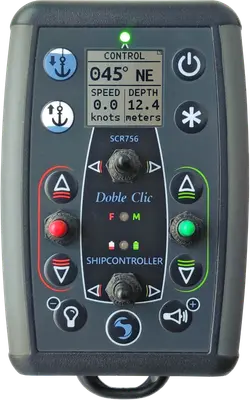
The Shipcontroller DockerPro is a remote control with a graphical display and data telemetry, incorporating toggle switches for direct control of engines and bow and stern thrusters. It also includes independent buttons for controlling the second speed of engines and other control functions.
Like the EZVector model, it is designed as a multifunctional remote control system. Thanks to its graphical display, data telemetry, and integration with the Shipcontroller system, it offers a set of features that make it unique in the market. Among its standout features are:
- Integrated display with navigation data telemetry and the OnRemoteSetup menu system.
- Hold Mode with bow and stern thrusters.
- DPS Mode for controlling the Shipcontroller Dynamic Positioning System.
- Chain counter and anchoring scope calculator. WindlassGuardian feature for windlass protection.
- Graphic depth sounder display and depth alarm.
DockerPro control capabilities

The DockerPro remote control, integrated with the Shipcontroller system, offers advanced features and complex calculations while seamlessly interacting with the boat's systems, bringing a new dimension to the concept of a "control channel," much like the EZVector model.
The DockerPro model's advanced control capabilities are designed to manage a wide range of systems and configurations aboard the vessel. These include:
Propulsion Control:
- Control of one, two, or more engines, with stepped proportional or dual/single speed control. Compatible with most electronic engine controls available on the market.
- Ability to select the engine control station and monitor control status (depending on the engine control system model).
- Control of bow and stern thrusters, with stepped proportional or on/off control. Compatible with most thruster systems on the market, whether electric or hydraulic, proportional or on/off.
- The PulseThrust feature, applicable to engines and thrusters, provides reduced average thrust or precise thrust pulses.
- The DobleClic function allows for two power levels using the control buttons or levers for engines or bow and stern thrusters.
Advanced Maneuvers:
- Control of the Shipcontroller Dynamic Positioning System (DPS), which maintains the boat’s position and heading within tight error margins.
Other Control Features:
- Control of one or two anchor windlasses, with a chain counter and anchoring scope calculator, and WindlassGuardian to protect the windlass and anchor during raising and lowering. (Features available for the main windlass).
- Control of a compatible autopilot, allowing for activation/deactivation and course adjustments.
- RC Mode for controlling optional modules, such as a compatible gangway or platform.
- Control of horn and deck lights.
Technical Features Summary
- Encrypted bidirectional radio system, based on the IEEE 802.15.4 protocol, robust and resistant to interference. A standard approved for use worldwide.
- High-quality, long service life control levers, in an easy-to-replace module, for engine and bow/stern thruster control.
- Hybrid technology display, ultra-low power consumption and high contrast, visible in direct sunlight and in low-light conditions.
- High-quality mechanical buttons with long service life. (Does not use a membrane keypad).
- Independent buttons for second-speed engine control, featuring the DobleClic function.
- Rechargeable LiPo battery. Contactless wireless charging, QI standard.
- Vibration motor for alerts and alarm signaling.
- Water-resistant remote control (IP65).
Multifunction remote control concept

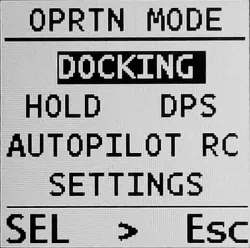
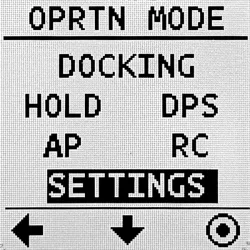
The EZVector and DockerPro remote controls incorporate the multifunction remote control concept, designed to offer comprehensive control over various aspects of boat operation, enhancing both maneuverability and safety:
- Docking Mode: The default mode for docking and anchoring maneuvers. It allows precise control of the boat's propulsion using the joystick and thruster control buttons, enabling combined maneuvers such as rotation with PivotPoint or lateral movements with SwayEase. It also provides control over the anchor windlass with the WindlassGuardian feature, which protects the windlass, rope, and anchor from damage. The different displays can show maneuver status, navigation data, chain count, an anchoring scope calculator, and a depth graph.
- Hold Mode: Activates both thrusters at low speed with just the press of a button, to keep the boat close to the dock. The thrust of the bow and stern thrusters can be adjusted independently using the thruster control buttons.
- DPS Mode: Enables, disables, and monitors the status of the optional Dynamic Positioning System (DPS) module, allowing for precise station and heading keeping. In this mode, propulsion control remains fully available.
- AP (Autopilot) Mode: Allows the remote to operate a compatible autopilot system, enabling the activation of Auto and Standby modes, and adjusting the heading in increments of ±1° and ±10°. While this mode is active, propulsion control functions are completely disabled.
- RC (Remote Control) Mode: Provides access to specific screens for controlling specialized expansion modules, such as a gangway/platform controller or an engine start/stop module.
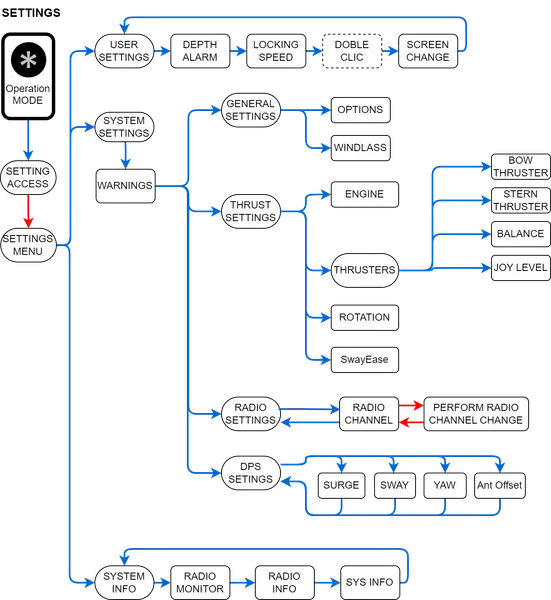
- SETTINGS Mode: Offers access to various configuration menus to customize the system according to user preferences. The OnRemoteSetup feature allows the installer or user to make most system adjustments directly from the remote control.
Anchoring, Navigation and Safety Features
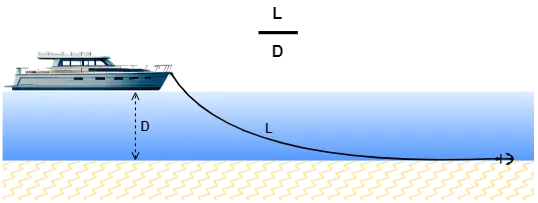
The chain counter function displays the length of chain deployed, the depth of the seabed, and the chain length-to-depth ratio (anchoring scope) on the remote control screen. This ratio is crucial for ensuring proper and safe anchoring.
This feature is available on the EZVector and DockerPro remotes.

The Shipcontroller base system can be connected to the boat’s data networks, such as NMEA2000®, NMEA0183®, or SeatalkNG®.
Through this connection, navigation data like heading, speed, depth, and wind are collected and transmitted to the remote control via an encrypted radio data channel, allowing them to be displayed on the screen or used for signaling, notifications, or alarms.
This feature is available on the EZVector and DockerPro remotes.
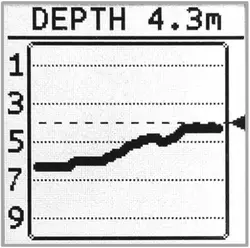
The depth graph and depth alarm functions are very useful during boat maneuvers, as they allow you to monitor the depth and avoid accidental grounding, especially when using the remote control away from the helm station, where you cannot see the boat’s instruments.
The Shipcontroller system collects depth data from the boat’s data networks and sends it to the remote control, which generates a depth trend graph and displays it on the graphical screen.
Additionally, the user can set the depth alarm threshold, so that the remote will alert with a message and vibration if the depth becomes too shallow.
This feature is available on the EZVector and DockerPro remotes.

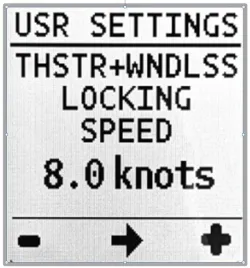
This feature enhances safety by automatically locking the windlass and thrusters at a certain speed, preventing accidental use and reducing the risk of damage.
By disabling the windlass and thrusters when the boat is moving too quickly, it prevents dangerous situations, such as the anchor deploying at excessive speeds, which could cause severe damage or loss of control.
Additionally, it ensures that the thrusters are not engaged when the boat is moving at a speed where their use would be ineffective or harmful.
Users can disable or adjust the lock speed via the remote control settings, providing the flexibility to adapt to different operational needs.
This safety feature ensures that control functions are not immediately available after pressing the remote's power button.
The user must confirm the remote's activation by pressing a different button.
The two-phase start can be disabled through the remote control settings if desired.
This feature is available for the DockerPro and EZVector remote controls.

WindlassGuardian protects the anchor windlass and the bow of the boat from the shocks and strains that can occur when raising the anchor or if the end of the anchor line is reached while deploying it.
WindlassGuardian allows setting chain counter limits for both lowering and raising the anchor, so that:
- If you are raising the anchor and the limit is reached (for example, 1.5 m): The windlass will stop, and the remote control will display a message on the screen and notify you with a vibration. To continue raising the anchor, you must release the windlass button and press it again.
- If you are lowering the anchor and the descent limit is reached: The windlass will stop. The remote control will display a warning message and notify you with a vibration. You will not be able to continue lowering the anchor from the remote control.

Communications and Control Features

The Shipcontroller radio protocol allows multiple remote controls to be used on the same boat, sharing unique security keys while ensuring that only one remote can have control at any given time.
Having a second remote enhances the safety and reliability of the Shipcontroller system, providing a backup in case of loss, breakage, or failure of the primary remote.

Shipcontroller NET is an extension of the Shipcontroller system that allows multiple radio transceivers to be deployed on the boat’s deck, forming a communication mesh network that offers advantages such as:
- Increasing the robustness and range of the radio system, especially on large vessels or when the deck is metal and may block radio signals.
- Providing redundancy and high availability of the radio system for critical applications.
The radio transceivers are interconnected through the Shipcontroller CANbus, which can reach lengths of 250 meters or even more using bus extensions.
The radio transceivers are powered directly from the bus, making installation very simple.
The NET system supports the use of multiple remote controls (even of different models) with concurrency control, ensuring that only one can have control at any given time.

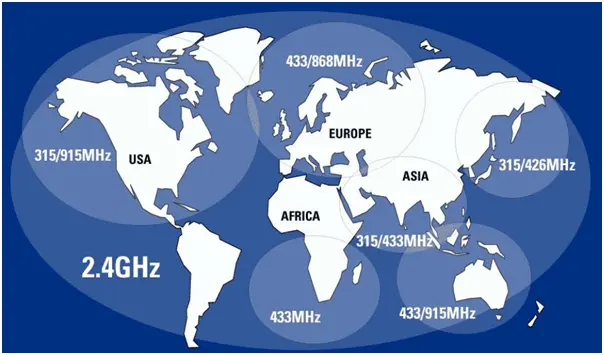
Shipcontroller uses a bidirectional radio communication system based on the standardized IEEE 802.15.4 protocol in the 2.4GHz band, offering numerous advantages:
- The bidirectional radio allows for continuous dialogue between the remote controls and the boat's transceivers. The radio link is permanently monitored, and the remote will immediately alert you in case of a radio link loss, loss of engine control, or other events or incidents.
- The 2.4GHz band and the 802.15.4 protocol are worldwide approved, unlike the 833MHz and 915MHz systems, which have significant regional restrictions. This means you can use your Shipcontroller system globally without legal limitations.
- Although it uses the same radio band as WiFi, the radio channels are different (there are 16) to avoid potential interference.
- It provides robust and reliable communication thanks to the DSSS (Direct Sequence Spread Spectrum) technique:
- It spreads the signal over a wider frequency band than necessary, distributing the energy across a broader spectrum, making it more resistant to narrowband interference.
- The signal is modulated using pseudo-random sequence codes. Only the receiver that knows this sequence can demodulate and recover the signal, reducing the possibility of interference or signal corruption.
- It offers an adequate data transmission speed to support a virtually unlimited number of control channels and the telemetry of navigation data.
- It supports point-to-point and multipoint configurations, allowing the implementation of the Shipcontroller NET system with multiple radio nodes and multiple remote controls.
- It supports 128-bit AES encryption for secure communications.
Each Shipcontroller system has a unique set of keys and identifiers, making it very difficult for the radio system to be intercepted: there are 10³⁸ possible keys.
The AP Mode of the DockerPro and EZVector remotes allows for control of a compatible autopilot. With the remote, you can switch between Standby and Auto modes, and make course adjustments in increments of ±1º or ±10º.
This feature is available on the EZVector and DockerPro remotes, and requires a specific interface adapter.

All Shipcontroller remote controls include buttons for activating the horn and deck lights.
The siren activation button is momentary, meaning it will sound the siren as long as the button is held down.
On the other hand, the deck light control function is toggle-type: the control output toggles each time the button is pressed. This toggled output can be used to turn the deck lights on and off, or for other purposes.
The RC (Remote Control) mode allows control of an optional expansion module to, for example, operate the movements of a gangway or motorized stern platform from the Shipcontroller remote control. These expansion modules are Plug & Play; once connected to the Shipcontroller network, they will be automatically detected by the remote control, which will enable the corresponding menus.
Expansion modules available:
- For controlling up to 4 axes of a compatible gangway or platform.
- With 8 general-purpose relay outputs.
- For engine start/stop (in development).
Hardware Features
The most advanced Shipcontroller remote controls feature a hybrid technology graphical display with ultra-low power consumption and a high refresh rate. Its features allow for smooth information display without annoying glitches, while also extending battery life.
The display allows you to view navigation information, alarms, graphs, and access the full OnRemoteSetup configuration and settings system.
This feature is available on the EZVector and DockerPro remotes.

Some Shipcontroller remote control models include independent buttons to activate the second engine speed, making boat maneuvers easier, especially when a bit more thrust is needed; for example, in strong wind or current conditions.
(The engine control system must be compatible with dual-speed control).
This feature is available on the DockerOne and DockerPro remotes.

IP65 is a rating defined by the International Electrotechnical Commission (IEC) under the standard IEC 60529. It is used to classify the degree of protection provided by enclosures for electrical equipment against dust and water. The "IP" stands for "Ingress Protection."
- 6: The first digit indicates protection against solid objects like dust. A rating of 6 means the enclosure is completely dust-tight, offering full protection against dust ingress.
- 5: The second digit indicates protection against liquids. A rating of 5 means the enclosure is protected against water jets from any direction. However, it is not fully waterproof, and prolonged submersion would not be covered.
In summary, IP65 means the device is fully protected against dust and can withstand low-pressure water jets, but it's not designed for full submersion in water.

All the Shipcontroller remote models feature an internal LiPo battery and a wireless charging receiver that operates under the QI standard, which is widely used by many smartphones. This means you can use the Shipcontroller charger to charge your QI-compatible phone, or use a smartphone QI charger to charge your Shipcontroller remote.
This compatibility allows for seamless charging experiences, ensuring that your remote is always ready for use without the need for specific charging cables. Whether on the boat or at home, users can easily charge their devices using common QI wireless chargers, enhancing both convenience and efficiency.
Smart Maneuvers
The DobleClic feature recognizes a double press of a button or switch, allowing different commands to be assigned to both a single and double press, making it possible to adjust two thrust levels for a thruster or engine, using the remote control's settings menus.
Although it resembles the "click" and "double-click" of a computer mouse, it is slightly different, as the button or lever must be held down for the action to take effect.
For example, the remote control can be configured so that a single press of a bow thruster button applies 60% power, while the "double click" applies 95%.
This feature is available on the EZVector and DockerPro remotes.
The HOLD mode with thrusters allows you to activate both thrusters simultaneously with a single press of a button or lever, applying a preset thrust to keep the boat close to the dock.
The thrust intensity can be dynamically increased by successive presses of the thruster controls.
This function requires proportional control bow and stern thrusters.
This feature is available on the EZVector and DockerPro remotes.

The PulseThrust function reduces the average thrust of an engine or thruster by applying long-cycle pulse width modulation (long-cycle PWM). It also allows for precise impulse durations. This technique is useful in the following scenarios:
- Engines, when idling, have very high thrust, making it difficult to control the boat's speed during low-speed maneuvers.
- Precise duration engine impulses are desired.
- Reduced average thrust is needed for on/off type thrusters; for example, to achieve parallel movement with SwayEase or to use Hold mode with on/off control thrusters.
Usability Features

All Shipcontroller remote controls include the Auto Power Off feature.
If the Shipcontroller base system is turned off, the remote will detect the loss of the radio link and notify you with visual signals (red LED) and vibration. If it is not used, it will power off after 30 seconds.
The Maneuver Monitoring feature provides a graphical visualization of how propulsion maneuvers commanded from the remote control are being executed.
This helps with learning how to maneuver the remote and ensures safe operation.

The EZVector and DockerPro remote controls incorporate the multifunction remote control concept, designed to offer comprehensive control over various aspects of boat operation, enhancing both maneuverability and safety:
- Docking Mode: The default mode for docking and anchoring maneuvers. It allows precise control of the boat's propulsion using the joystick and thruster control buttons, enabling combined maneuvers such as rotation with PivotPoint or lateral movements with SwayEase. It also provides control over the anchor windlass with the WindlassGuardian feature, which protects the windlass, rope, and anchor from damage. The different displays can show maneuver status, navigation data, chain count, an anchoring scope calculator, and a depth graph.
- Hold Mode: Activates both thrusters at low speed with just the press of a button, to keep the boat close to the dock. The thrust of the bow and stern thrusters can be adjusted independently using the thruster control buttons.
- DPS Mode: Enables, disables, and monitors the status of the optional Dynamic Positioning System (DPS) module, allowing for precise station and heading keeping. In this mode, propulsion control remains fully available.
- AP (Autopilot) Mode: Allows the remote to operate a compatible autopilot system, enabling the activation of Auto and Standby modes, and adjusting the heading in increments of ±1° and ±10°. While this mode is active, propulsion control functions are completely disabled.
- RC (Remote Control) Mode: Provides access to specific screens for controlling specialized expansion modules, such as a gangway/platform controller or an engine start/stop module.
- SETTINGS Mode: Offers access to various configuration menus to customize the system according to user preferences. The OnRemoteSetup feature allows the installer or user to make most system adjustments directly from the remote control.
OnRemoteSetup allows users to configure most system settings directly from the remote control using its buttons, screen, and menus.
This feature enhances convenience and efficiency by enabling on-the-go adjustments without the need to access a central control unit.
The intuitive interface ensures ease of use, while the ability to make real-time changes improves both safety and operational performance.
Customizable settings let users tailor the system to their specific needs, ensuring optimal control and management.
This feature is available for the DockerPro and EZVector remote controls.