The EZVector and DockerPro remote controls incorporate the multifunction remote control concept, designed to offer comprehensive control over various aspects of boat operation, enhancing both maneuverability and safety:
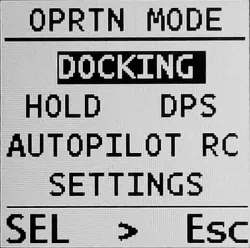
- Docking Mode: The default mode for docking and anchoring maneuvers. It allows precise control of the boat's propulsion using the joystick and thruster control buttons, enabling combined maneuvers such as rotation with PivotPoint or lateral movements with SwayEase. It also provides control over the anchor windlass with the WindlassGuardian feature, which protects the windlass, rope, and anchor from damage. The different displays can show maneuver status, navigation data, chain count, an anchoring scope calculator, and a depth graph.
- Hold Mode: Activates both thrusters at low speed with just the press of a button, to keep the boat close to the dock. The thrust of the bow and stern thrusters can be adjusted independently using the thruster control buttons.
- DPS Mode: Enables, disables, and monitors the status of the optional Dynamic Positioning System (DPS) module, allowing for precise station and heading keeping. In this mode, propulsion control remains fully available.
- AP (Autopilot) Mode: Allows the remote to operate a compatible autopilot system, enabling the activation of Auto and Standby modes, and adjusting the heading in increments of ±1° and ±10°. While this mode is active, propulsion control functions are completely disabled.
- RC (Remote Control) Mode: Provides access to specific screens for controlling specialized expansion modules, such as a gangway/platform controller or an engine start/stop module.
- SETTINGS Mode: Offers access to various configuration menus to customize the system according to user preferences. The OnRemoteSetup feature allows the installer or user to make most system adjustments directly from the remote control.